 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

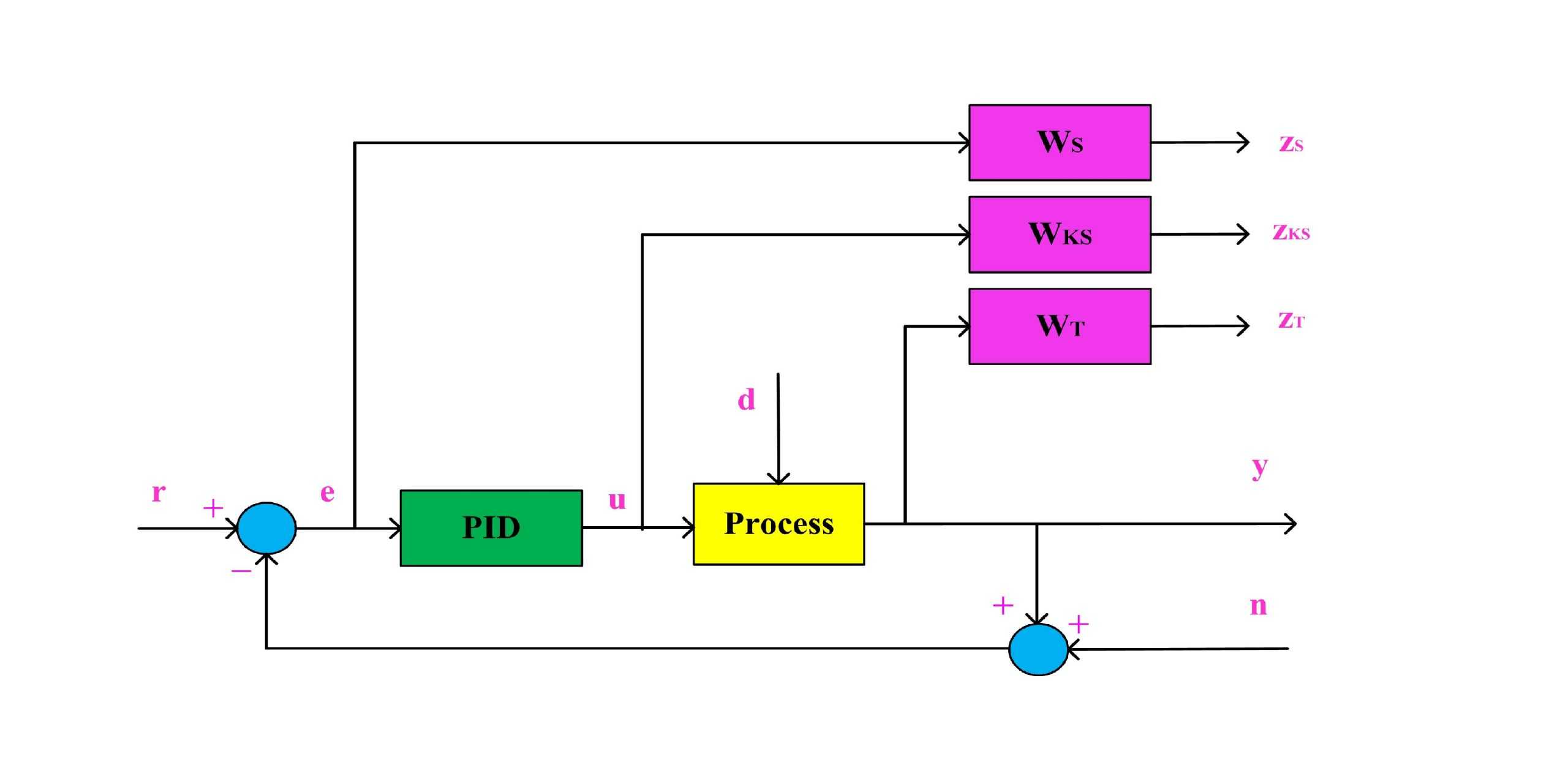
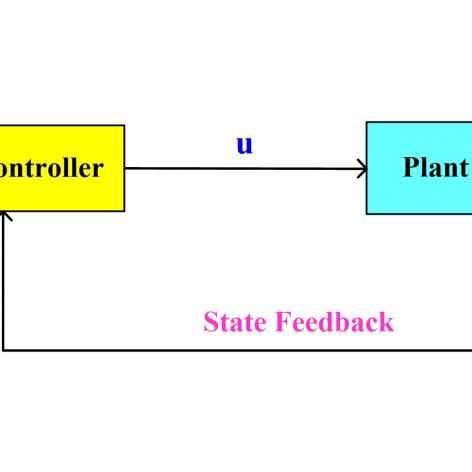
در شش مجموعه قبلی مربوط به کنترل مقاوم، نحوه فرمولبندی مساله کنترل مقاوم ∞H سیستمهای خطی تحت اغتشاش (فیدبک حالت و فیدبک خروجی)، نامعینی پارامتری (فیدبک حالت و فیدبک خروجی) و اغتشاش و نامعینی پارامتری (فیدبک حالت و فیدبک خروجی) مورد بررسی قرار گرفت. در مجموعه های قبلی وزنهای تابع جریمه همگی ثابت انتخاب شده بودند (وزندهی استاتیک). در این مجموعه مساله کنترل مقاوم ∞H سیستمهای خطی تحت اغتشاش (فیدبک حالت) با استفاده از وزندهی دینامیک بررسی می شود تا اهداف کنترلی در بازه فرکانسی مطلوب بدست آید. لطفا قبل از ورود به مباحث مجموعه حاضر، این مجموعه را ببینید.
جلسه 1: مبانی ریاضی و تعریف مساله
جلسه 2: فرمولبندی مساله وزن دهی دینامیک
جلسه 3: فرمولبندی مساله وزن دهی دینامیک
۱۴۹,۰۰۰ تومانAdd to cart
راهنمای خرید:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.








هادی
سلام و عرض ادب خدمت شما استاد گرامی
با توجه به اینکه روش شکل دهی حلقه یک مفهوم فرکانسی است. آیا می توان ماتریس های سیستم را نامعین در نظر گرفت و LMI به دست آمده را با نامعینی تلفیق کرد؟ این سوال را به این دلیل پرسیدم چون در این حالت، سیستم دیگر LTI نیست و روش های فرکانسی را شاید نتوان برای آن به کار گرفت.
سپاسگزارم از شما استاد گرانقدر
دکتر علی جوادی
سلام
نه مشکلی نیست و میشه نامعینی رو در نظر گرفت.
در ضمن در اینحالت سیستم همچنان LTI هست
هادی
بسیار سپاسگزارم بابت پاسخگویی
اگر مدل فضای حالت سیستم دارای ترم غیرخطی مثل f باشد، در صورتی که مدل سیستم در روابط جایگزین شود و LMI های جدید به دست آید، این روند به نظر شما منطقی است یا خیر؟
با سپاس فراوان
دکتر علی جوادی
بله اگر بتونید فرمولبندی کنید مشکلی نیست
الیاس
سلام آقای دکتر. وقت شما بخیر.
خواستم پیشاپیش سال نو را خدمتتان تبریک بگویم.
من اکثر فیلم های آموزشی شما را خریداری نموده ام. ممنونم بابت تدریس فوق العاده تان. زحمت های شما را هیچگاه فراموش نخواهیم کرد.
با سپاس فراوان
محمود
با سلام و وقت بخیر. ببخشید من این سری فیلم ها رو تهیه کردم ولی فیلم جلسه دوم را نمی توانم ببینم.یعنی اکسترکت نمی شود و خطا می دهد. البته پاور پوینت و پی دی اف اکسترکت میشه ولی فیلم نه.چندین بار هم دانلود کردم ولی همین مشکل پیش آمد. ممنون میشم راهنمایی بفرمایید.
مدیر سایتادمین سایت ( خریدار محصول )
سلام و وقت بخیر
در صورتیکه از اینترنت دانلود منیجر IDM استفاده می کنید لطفا تعداد کانکشن را یک انتخاب کنید. یا اینکه کلا دانلود را با استفاده از مرورگر انجام دهید لطفا.
در صورت وجود داشتن مشکل به مدیریت 09132851920 واتساپ پیام دهید.
با تشکر
محمود
با سلام و وقت بخیر
ببخشید من فیلم جلسه دوم را نمیتوانم اکسترکت کنم…اررور میدهد…چندین بار هم دانلود کردم نشد…البته پاور پوینت و پی دی اف را می آورد. ممنون میشم راهنماییم کنید.
الیاس
ممنونم آقای دکتر. از وقتی که بابت پاسخگویی گذاشتید.
در واقع مقادیر xr، z1r، z2r و vr از روی سیستم افزوده شده در دقیقه ۲۲:۵۰ از قسمت دوم، به دست می آید. به طوری که به جای تمام حالت ها،مقادیر مرجع آن ها و به ازای u، پارامتر vr جایگذاری می شود.
آیا به نظر شما این تعبیر درست نیست؟
با تشکر از شما
alij63@gmail.com
خیر. به جای هر متغیر مقدار نامی آن جاگذاری میشه. به جای u مقدار ur باید جاگذاری بشه
الیاس
سلام آقای دکتر. روز شما بخیر.
در دقیقه 12:45 و 17:50 از قسمت سوم، شما ur را برابر صفر قرار می دهید.
با توجه به مدل ارائه شده در دقیقه 22:50 از قسمت دوم، آیا مقادیر ur نباید برابر با vr برای محاسبه z1r و z3r در نظر گرفته شود؟
ممنونم از شما استاد گرامی
alij63@gmail.com
سلام
خیر. چون u ظاهر شده باید مقدار نامی ur جاگذاری بشه که برابر صفره
الیاس
با سلام و عرض خسته نباشید.
زمانی که ضرایب وزنی دینامیکی به حوزه زمان برده می شود. هر کجا که s باشد، مشتق زمانی آن عبارت قرار داده می شود. با توجه به این که مشتق زمانی در حوزه لاپلاس، ترم x0- را نیز شامل می شود. از طرفی ممکن است این ترم صفر نباشد. ولی در تبدیل لاپلاس صفر در نظر گرفته می شود.
میخواستم بدانم شما چگونه این را تفسیر می نمایید؟
با سپاس از شما
alij63@gmail.com
سلام
شرایط اولیه فیلتر رو صفر در نظر میگیریم
الیاس
سلام عرض می کنم خدمت شما استاد گرامی
فیلم های آموزشی تان مثل همیشه بسیار عالی است.
سپاسگزارم بابت اینکه مطالب خوب و کاربردی با کیفیت عالی تدریس می کنید.
alij63@gmail.com
سلام
متشکر