 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم


در این پست ایده حل تلفیق کنترل کننده های پسگام و مد لغزشی قرار داده شده است. تلفیق بعضی از کنترل کننده ها با هم کار ساده ای به شمار میره. بعنوان مثال تلفیق ژنتیک با کنترل کننده مد لغزشی، فازی و گام به عقب و ….. اما روش های تحلیلی وقتی با هم تلفیق می شوند باید اثبات ریاضی داشته باشند. و به سادگی این کار امکان پذیر نیست.
سالهاست که روی روش های مد لغزشی و گام به عقب کار می کنم و با انواع روش های مختلف تلفیق کردم. اما این دو روش رو کمتر کسی می تونه با هم تلفیق کنه. من دو روش مد لغزشی و گام به عقب رو با هم تلفیق کردم و از همه مهمتر اثبات پایداریش رو هم انجام دادم. و نهایتا این روش رو روی سیستم توپ و میله پیاده کرده و در نرم افزار متلب شبیه سازی کردم. هر سیستم جدیدی که انتخاب کنید با اعمال این روش روی اون قطعا یک مقاله از توش در میاد! فقط سیستم باید به فرم معروف آفین (affine) باشه. فایل شبیه سازی و گزارش از روند انجام کار رو آوردم . گزارش یازده صفحه ای شامل فهرست زیره
- مقدمه
- روش بازگشت به عقب
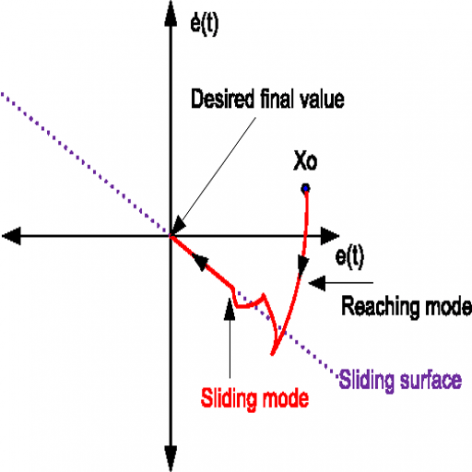
- روش مد لغزشی
- تلفیق مد لغزشی و گام به عقب
- تشریح سیستم توپ و میله
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.






mohammad
سلام من آموزش فازی با اسلایدینگ مد دیدم. خیلی خوب بود چون چترینگ کاهش می داد ولی متاسفانه منطق فازی قابلیت انتقال به dsp نداره. آیا این کنترل کننده قابلیت حذف چترینگ و انقال به dsp داره؟ آیا برای اصلاح ضرایب اسلایدینگ مد میشه استفاده کرد؟
سعید پارسامهر
سلام. خواهش می کنم یه ویدئو تهیه بفرمایید. من جزوه رو خریدم ولی توضیحاتش واقعا دیگه خیلی کمه. و این که مثال رو قبل از کد کردن به صورت دستی هم حل کنید لطفا که اون روابط ریاضی رو بتونیم بهتر متوجه بشیم. این طوری خیلی مخاطب رو به حال خودش رها کردید.
من از آموزشای ویدئویی شما خیلی راضی بودم و تونستم به کارشون بگیرم. چندتاشون رو هم خریدم.
تشکر
مدیر سایتادمین سایت ( خریدار محصول )
سلام لطف دارید. من این موضوع رو مقاله کردم و یک مقاله علمی پژوهشی در همین زمینه دادم. اونجا مثال هدایت موشک به صورت کامل بررسی شده میتونید به صورت رایگان از نت دانلود کنید (از طریق دانشگاه)
سارا
با سلام و احترام
در کنترل موتور pmsm هم می توان از این روش استفاده کرد؟ سرعت refrence دائما در حال تغییر است به همراه تغییر بار. با روش لغزشی هنگام تغییر سرعت چترینگ و نوسان زیادی وجود دارد. لطفا در این خصوص راهنمایی بفرمایید. ممنون.
مدیر سایتادمین سایت ( خریدار محصول )
سلام بله.
امیر
با عرض سلام و احترام ، خیلی ممنونم بابت آموزش های خوب تون … سایت شما واقعا در تحصیلات آکادمیک به من کمک زیادی کرده و واقعا جا داره تشکر کنم از شما و همکاران ارجمندتون
جسارتا می خواستم بپرسم که با توجه به این که ترکیب بک استپ و اسلایدینگ مد و نمونه های تلفیق شده این روش با الگوریتم ژنتیک و … مقالاتی ازش موجوده ، آیا در صورتی که ما بخوایم از این روش که شما در جزوه فرمودین مقاله منتشر کنیم ، آیا نیازی به استفاده از نوآوری های دیگه ای هم هست برای چاپ مقاله با اثباتی که جنابعالی زحمت کشیدین و ارایه فرمودین و این که اگر اثبات ریاضی و تحلیلی ما برای یک روش کنترلی ( مثلا همین بک استپ و اسلایدینگ مد) با سایر مقالات ارایه شده فرق کنه ، بازم می شه ازش مقاله ارایه داد؟ ، با توجه به این که کنترل کننده بک استپ اسلایدینگ مد در نهایت به نظرم یکسان خواهد بود ؟
با تشکر از شما و ببخشین که سوالاتم طولانی بود دکتر موسی پور عزیز
مدیر سایتادمین سایت ( خریدار محصول )
سلام لطف دارید. برای ارائه مقاله موارد زیادی باید در نظر گرفت از جمله اینکه قصدتون مقاله ژورنالی هست یا کنفرانسی اگر ژورنال هست کوارتایلش چنده؟ خود این موارد میتونه استفاده از روش هاتون رو سخت تر یا اسون تر کنه. از طرفی موضوع مقاله هم مهمه شما میتونید یک روش کنترلی ارائه کنید که هیچ مقاله ای ارائه نکرده یا اینکه یک روش ساده کنترلی رو بر روی یک سیستم که خودتون اون سیستم رو ساختید و شناسایی کردین پیاده سازی کنید یا ترکیبی از این دو خلاصه اینکه به موارد زیادی وابستس
جواد
سلام
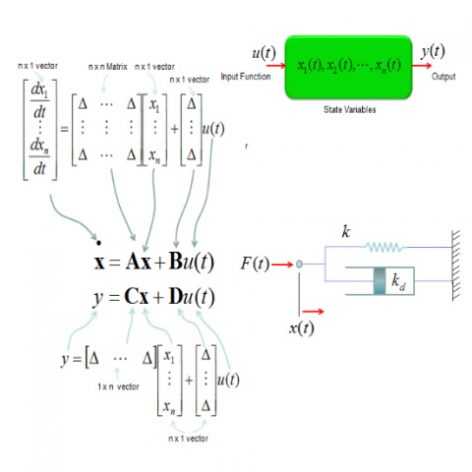
ببخشید این روش رو روی سیستم خطی بفرم فضای حالت (با یا بدون عناصر غیرخطی مانند dead zone یا saturation) میشه اعمال کرد؟ اگر نمیشه آیا تبدیلی هست که فضای حالت سیستم رو به فرم قابل استفاده برای backstepping در بیاره؟
مدیر سایتادمین سایت ( خریدار محصول )
@جواد,
سلام هر روش غیرخطی رو میشه روی سیستم های خطی هم اعمال کرد چون سیستم های خطی حالت خاصی از سیستم های غیرخطی هستند. این روش هم از این قضیه مستثنی نیست. روشی که اینجا گفته شده برای سیستم هایی هست که بدون ناحیه مرده یا اشباع روی ورودی هستند آموزش داده شده. اما قاعدتا قابل توسعه نیز هست.
m
سلام ببخشید توی آموزش ” تلفیق کنترل کننده های پسگام و مد لغزشی” شبیه سازی با سیمولینکه؟ یا کد نویسی
مدیر سایتادمین سایت ( خریدار محصول )
@m,
کد نویسی
عادل
سلام
اقای دکتر اگر سیستم affine و mimo باشه روش گام به گام به عقب را چطور می شود استفاده نمود؟ درصورت امکان پاسخ دهید.
ممنون
عادل
مدیر سایتادمین سایت ( خریدار محصول )
@عادل,
سلام. اگه سیستم افاین نباشه نه
fah
سلام و ادب
من کنترل ربات زیر آبی کار می کنم
تمکان استفاده از روش شما هست؟؟
مدیر سایتادمین سایت ( خریدار محصول )
@fah,
سلام بله