احتمالا برای شما هم پیش اومده که در یک مقاله یا کتاب به جایی رسیدید که باید یک ناتساوی ماتریسی خطی (یا LMI) رو حل کنید و در بدر دنبال یک نفر هستید تا در کوتاهترین زمان ممکن حل این نوع ناتساوی ها رو به شما یاد بده تا مجبور نباشید زمان قابل توجهی صرف کنید و از منابع مختلف دنبال راه حل باشید. اگر شما هم جزو این دسته از محققین هستید دیگه نگران نباشید. در این پست قراره تمام جزییات و کلیات نامساوی ماتریسی خطی (و حتی غیرخطی) با نحوه حل اونها در متلب و با دو روش تولباکس متلب و YALMIP به روش ساده و با مثالهای مفصل توضیح داده بشه. اگر با این فیلمهای آموزشی همراه شده و مرحله به مرحله مثالها رو پیش برید بعد از این 11 جلسه قادر خواهید بود حل کننده (solver) مناسب رو برای مساله خودتون انتخاب کرده و ناتساویهای ماتریسی خودتون رو باهاش حل بکنید. بعد از تشریح کامل دو روش بالا یک مثال از طراحی کنترل کننده برای سیستم شناور مغناطیسی از یک مقاله IEEE با استفاده از LMI خدمت شما ارایه میشه (به همراه شبیه سازی در محیط سیمولینک) تا مطلب کامل جا بیافته. با ما همراه باشید…
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری سیستمهای کنترل خطی – آشنایی با کدنویسی در محیط متلب
جلسه اول: مقدمات ریاضی و تعریف ناتساوی های ماتریسی
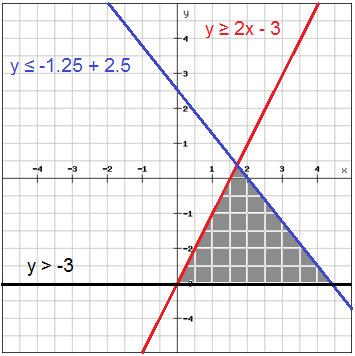
در این جلسه ابتدا مقدمات ریاضی و تعریف ناتساوی های ماتریسی به همراه مفاهیم مجموعه های محدب و نامحدب توضیح داده میشه و چند مثال هم از هر دو نوع مجموعه ارایه میشود. سپس نحوه تبدیل ناتساویهای خام به حالت استاندارد تشریح شده و در انتها روشهای مختلف حل عددی ناتساویهای ماتریسی به طور خلاصه مطرح میشود. جهت ارزیابی شما عزیزان جلسه اول رایگان تقدیم میشود.
مدت زمان آموزش: 49 دقیقه
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
حجم فایل: 65 مگابایت
پیش نمایش جلسه اول:
جلسه دوم: تعیین متغیرهای ماتریسی و وارد کردن جملات LMI در تولباکس متلب
در این جلسه کار با تولباکس LMI متلب را شروع کرده و مراحل مختلف ایجاد یک LMI ارایه میشود. به طور خاص نحوه تعیین متغیرهای ماتریسی و همینطور نحوه وارد کردن جملات داخلی و خارجی به همراه مثال در محیط متلب تشریح میشود.
مدت زمان آموزش: 69 دقیقه
محتویات درس: فیلم با کیفیت 720p- پاورپوینت درس- کد متلب مربوط به مثالها- فایل pdf راهنمای استفاده از تولباکس متلب و لیست مرتب شده تمام دستورات مرتبط با تولباکس LMI متلب
حجم فایل: 89 مگابایت
پیش نمایش جلسه دوم:
جلسه سوم: معرفی دستور feasp تولباکس متلب جهت حل LMI
در این جلسه دستورات مختلفی که برای کسب اطلاعات تکمیلی از متغیرها و LMI های تعریف شده در متلب وجود دارند بررسی شده و با مثال تشریح می شوند. در ادامه یکی از دستورات مهم تولباکس LMI متلب که برای حل مسایل ناتساوی مورد استفاده قرار میگیرد معرفی شده و یک مثال از تحلیل پایداری سیستم کنترلی برای آن ارایه میشود.
مدت زمان آموزش: 68 دقیقه
محتویات درس: فیلم- پاورپوینت درس و کد متلب مربوط به مثالها
حجم فایل: 100 مگابایت
پیش نمایش جلسه سوم:
جلسه چهارم: معرفی دستورات mincx و gevp تولباکس متلب جهت حلمسایل مینیممسازی
در این جلسه ابتدا دستور mincx که برای حل ناتساویهای ماتریسی با شرط مینیمم سازی (یا ماکزیمم سازی) استفاده میشود به طور کامل تشریح شده و مثال جلسه قبل با شرط مینیمم و ماکزیمم سازی دوباره با این دستور حل میشود. همچنین دستور gevp که مربوط به حل مسایل مینیمم سازی مقدار ویژه تعمیم یافته میباشد تشریح میشود.
مدت زمان آموزش: 51 دقیقه
محتویات درس: فیلم- پاورپوینت درس و کد متلب مربوط به مثالها
حجم فایل: 69 مگابایت
پیش نمایش جلسه چهارم:
جلسه پنجم: طراحی کنترل کننده فیدبک حالت برای سیستم خطی و حل LMI های آن با تولباکس متلب
در این جلسه ابتدا دستورات باقیمانده که مربوط به ارزیابی LMI بعد از حل آن است معرفی میشوند. در ادامه یک مثال از طراحی کنترل کننده فیدبک حالت برای سیستم خطی به شکل LMI فرمول بندی شده و با تولباکس LMI متلب حل میگردد. نهایتا دو ترفند بسیار پرکاربرد تبدیل متجانس (Congruent transformation) و لم شور (Schur complement) برای LMI بیان میشوند.
مدت زمان آموزش: 53 دقیقه
محتویات درس: فیلم- پاورپوینت درس و کد متلب مربوط به مثالها
حجم فایل: 76 مگابایت
پیش نمایش جلسه پنجم:
جلسه ششم: معرفی تولباکس یالمیپ برای حل LMI و نجوه دانلود و نصب آن
از این جلسه معرفی تولباکس YALMIP شروع میشود و ابتدا توضیحات مقدماتی درباره آن و مزایای آن نسبت به تولباکس متلب ارایه میشود. در ادامه تمامی مراحل دانلود و نصب این تولباکس بر روی متلب به صورت گام به گام تشریح میشود. در انتها نحوه ارزیابی نصب درست تولباکس و solver های موجود در آن توضیح داده میشود.
توجه: اخیرا ظاهر و پوسته سایت YALMIP دچار تغییر و تحول شده و با صفحات نشان داده شده در فیلمهای حاضر قدری متفاوت است. با توجه به اینکه محتویات سایت YALMIP تغییر پیدا نکرده و تنها محل لینکها تغییر پیدا کرده (مثلا لینکهای ستونی سمت چپ به بالای صفحه انتقال پیدا کرده)، فیلمهای موجود دوباره ضبط نشده و همین فیلمها قابل استفاده هستند.
مدت زمان آموزش: 47 دقیقه
محتویات درس: فیلم آموزشی
حجم فایل: 96 مگابایت
پیش نمایش جلسه ششم:
جلسه هفتم: تعریف متغیرهای ماتریسی و قیدها با استفاده از تولباکس یالمیپ
در این جلسه ابتدا نحوه تعریف متغیرهای ماتریسی با مثالهای متنوع در محیط متلب توضیح داده شده و سپس چگونگی تعریف قیدها یا همان ناتساویهای ماتریسی جهت استفاده در YALMIP با چندین مثال تشریح میشود.
مدت زمان آموزش: 62 دقیقه
محتویات درس: فیلم آموزشی- فایل پاورپوینت و کد مثالهای نوشته شده در این جلسه
حجم فایل: 85 مگابایت
پیش نمایش جلسه هفتم:
جلسه هشتم: تعریف تابع هزینه و حل LMI با استفاده از تولباکس یالمیپ
در این جلسه نحوه تعریف تابع هزینه، گزینه های اختیاری مربوط به YALMIP (به جز solver ها)، چگونگی حل مساله و در نهایت روش استخراج متغیرهای ماتریسی تشریح شده و مثال تحلیل پایداری که جلسات پیش با تولباکس متلب حل شده بود، با YALMIP هم حل میشود.
مدت زمان آموزش: 71 دقیقه
محتویات درس: فیلم آموزشی- فایل پاورپوینت و کد مثالهای نوشته شده در این جلسه
حجم فایل: 114 مگابایت
پیش نمایش جلسه هشتم:
جلسه نهم: معرفی و تشریح نحوه دانلود و نصب سه solver پرکاربرد به نامهای PENBMI ، SDPT3 و MOSEK
مباحث باقیمانده از توضیحات مربوط به YALMIP از جمله solver ها (داخلی و خارجی) در این جلسه مورد بحث قرار میگیرد. به طور خاص نحوه دانلود و نصب سه solver پرکاربرد به نامهای PENBMI ، SDPT3 و MOSEK به طور کامل تشریح شده و مثال تحلیل پایداری سیستم خطی که در جلسات قبل با تولباکس متلب حل شده بود، با این سه solver نیز حل میگردند.
مدت زمان آموزش: 73 دقیقه
محتویات درس: فیلم آموزشی- فایل پاورپوینت و کد مثالهای نوشته شده در این جلسه
حجم فایل: 169 مگابایت
پیش نمایش جلسه نهم:
جلسه دهم: معرفی دینامیک غیرخطی قطار مغناطیسی شناور و خطیسازی حول نقطه کار
در این جلسه تکنولوژیهای موجود در ساخت قطارهای مغناطیسی معرفی شده و دینامیک غیرخطی شناورسازی یک قطار مغناطیسی با تکنولوژی EMS از یک مقاله IEEE ارایه میشود. در ادامه نقاط تعادل و نامی دینامیک استخراج شده و حول نقطه مورد نظر خطیسازی ژاکوبی انجام میشود تا ماتریسهای مورد نیاز برای طراحی کنترلکننده فیدبک حالت بدست آورده شود.
مدت زمان آموزش: 66 دقیقه
محتویات درس: فیلم آموزشی و کلیپی کوتاه از عملکرد قطار مغناطیسی- فایل پاورپوینت و مقاله IEEE حاوی دینامیک شناورسازی قطار مغناطیسی
حجم فایل: 116 مگابایت
پیش نمایش جلسه دهم:
جلسه یازدهم: طراحی و شبیهسازی فیدبک حالت برای سیستم شناور مغناطیسی
در این جلسه ابتدا دینامیک غیرخطی شناور مغناطیسی در محیط متلب و در نقطه کار دلخواه خطی شده و سپس با هر دو روش تولباکس LMI متلب و YALMIP مساله پایدارسازی سیستم خطی شده با فیدبک حالت حل میشود. همچنین بعد از بدست آوردن بهره کنترل کننده با استفاده از solver های PENBMI، SDPT3 و MOSEK در محیط YALMIP و بهره بدست آمده از تولباکس متلب، سیستم حلقه بسته (با دینامیک غیرخطی) در محیط سیمولینک شبیه سازی شده و نتایج حاصل از این بهره ها باهم مقایسه شده است.
مدت زمان آموزش: 67 دقیقه
محتویات درس: فیلم آموزشی- فایل پاورپوینت و کدها و فایلهای شبیه سازی سیستم حلقه بسته
حجم فایل: 113 مگابایت
پیش نمایش جلسه یازدهم:
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم








m.mohamadpour.f ( خریدار محصول )
سلام
وقت بخیر
بسیار کاربردی و روان گفته شده
سپاس فراوان از آقای دکتر
علی
سلام وقت بخیر، ببخشید از فایل های اموزشی برای سیستم های گسسته می توان استفاده کرد؟یا اینکه فقط سیستم های پیوسته را اموزش داده اید.
دکتر علی جوادی
سلام
فقط برای سیستمهای پیوسته قابل استفاده هستند
الیاس
با عرض سلام و خسته نباشید خدمت شما استاد گرامی.
ممنون از آموزش های خوبتان.
از معادلات حالت سیستم تا چند مرتبه می توان مشتق گرفت؟ در واقع سیگنال های حالت تا چه مرتبه ای مشتق پذیر هستند؟
آیا تا هر مرتبه ای که بخواهیم می توانیم از معادلات سیستم مشتق بگیریم؟
با سپاس
دکتر علی جوادی
سلام
در این زمینه اطلاعی ندارم
farzaddalvand
سلام استاد برای کوادکوپتر شما تا الان کار کردید
دکتر علی جوادی
سلام. خیر
محمد
سلام و وقت بخير خدمت اقاي دکتر ،دکتر جان ببخشيد براي آشنايي با سيستم هاي افاين يا افاين فازي جزوه يا .. نداريد من بخونم نياز دارم. ممنوم
alij63@gmail.com
سلام
من در زمینه فازی کار نکردم و اطلاعی ندارم.
saber
سلام آقای دکتر. ماتریس c در دستور mincx چطور بدست میاد؟
alij63@gmail.com
سلام
بستگی داره چی رو بخواهید مینیمم کنید.
جلسه 5 رو با دقت ببینید
علی
با سلام.
برای خرید نوشته شده: برای خرید تمامی جلسات با ۱۰ درصد تخفیف گزینه آخر را انتخاب کنید.
اما 10 درصد تخفیف نیست و فقط 1 درصد هست. امکام دارد بررسی کنید تا کمکی به ما بشود.
alij63@gmail.com
سلام
از مشکل به وجود اومده معذرت خواهی میکنم.
قیمت اصلاح شد
صدیقه
سلام.
یه سوالی داشتم از خدمتتون ممنون میشم جواب بدین. من میخوام رو بهینه سازی محدب کار کنم و مقاله ای رو پیاده سازی کنم. تو مقاله نوشته که از تولباکس cvx استفاده شده. ولی من چون آموزشی برای cvx پیدا نکردم از فیلمای شما برای یادگیری یالمیپ استفاده کردم. میخواستم ببینم چه تفاوتی بین مدلسازی یالمیپ و cvx وجود داره و همون مساله رو میتونم با یالمیپ پیاده سازی کنم؟( مساله یک تابع غیر محدب هست که قراره ماکزیمم بشه که با استفاده از تقریب تیلور کران پایین اون بدست میاد و تبدیل به محدب میشه و نهایتا با الگوریتم تکراری به یه جواب همگرا میشه) ممنون میشم راهنمایی بفرماید.
alij63@gmail.com
سلام
تفاوتشون در دقایق 11 تا 14 جلسه 6 بیان شده