مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

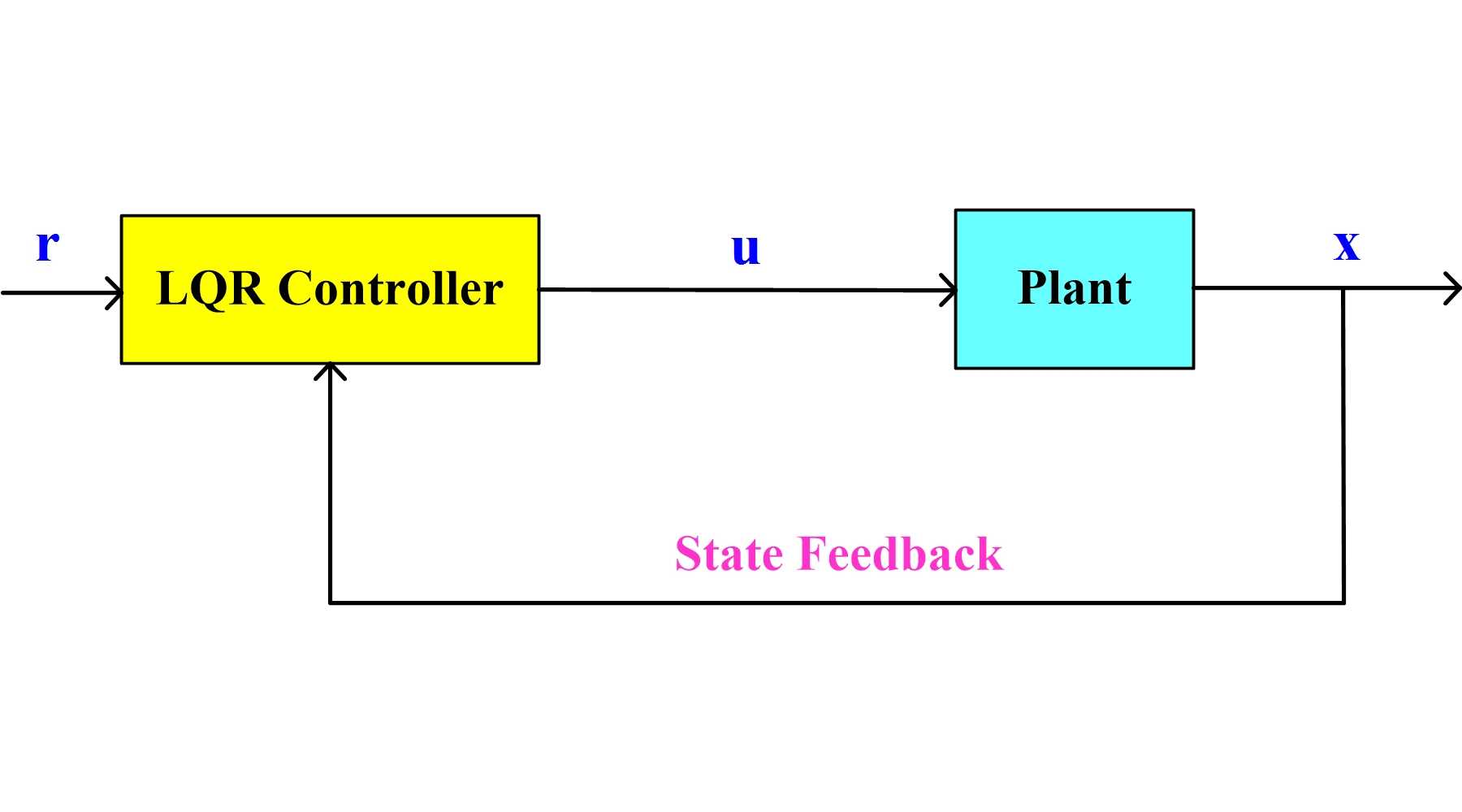
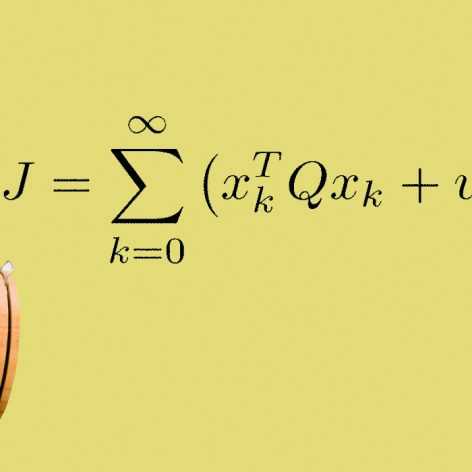
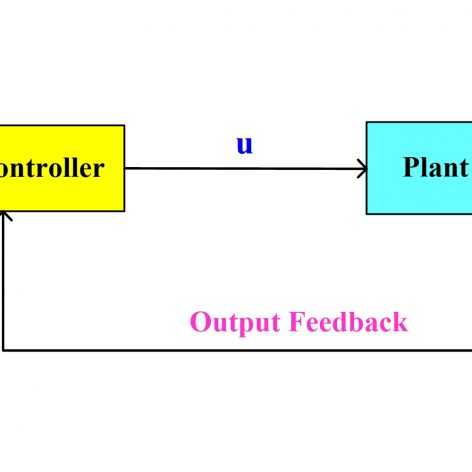
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از روشهای کنترلی بهینه رگولاتور درجه دوم خطی (Linear Quadratic Regulator) است که به اختصار LQR خوانده میشود. این روش برای سیستمهای خطی بهینه بوده و با توجه به روند سرراست طراحی و سادگی ساختار آن در کاربردهای فراوانی با موفقیت مورد استفاده قرار گرفته است. با اینکه روش LQR تنها برای سیستمهای خطی بهینه بوده و پایداری سیستم را تضمین میکند، با استفاده از خطیسازی ژاکوپی، میتوان آنرا به سیستمهای غیرخطی نیز اعمال کرد؛ هرچند در اینصورت کنترلکننده دیگر بهینه نیست اما در بسیاری از کاربردها عملکرد خوبی از خود نشان میدهد. در این مجموعه آموزشی نحوه طراحی و پیادهسازی کنترلکننده LQR برای سیستمهای خطی و غیرخطی در محیط نرمافزار متلب آموزش داده میشود.
پیشنیاز: آشنایی اولیه با نرم افزار متلب – تئوری سیستمهای خطی
جلسه اول:
معرفی سیستمهای کنترل بهینه LQR و دستورات متلب
جلسه دوم:
طراحی و شبیهسازی کنترلکننده بهینه LQR برای سیستم گوی و میله

جلسه سوم:
طراحی کنترلکننده بهینه LQR برای سیستمهای غیرخطی و پیادهسازی بر روی سیستم شناور مغناطیسی

برای خرید کل جلسات با 10 درصد تخفیف گزینه آخر را انتخاب کنید
۱۶۴,۴۰۰ تومانAdd to cart
")
")