 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

شبیه سازی مقاله ژورنال (Elsevier (Applied soft computing سال 2011
Adaptive fuzzy sliding mode control using supervisory fuzzy control
for 3 DOF planar robot manipulators
شبیه سازی بازوی ربات 3 لینکه مسطح با استفاده از کنترلر فازی اسلایدینگ تطبیقی
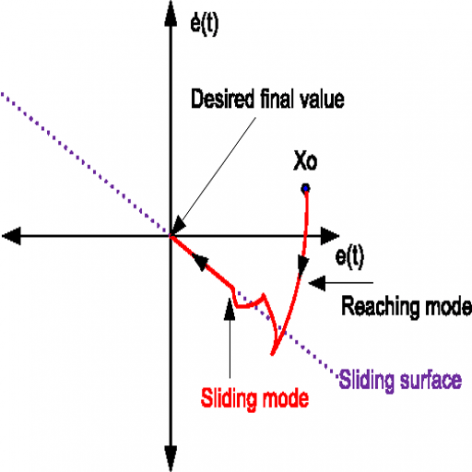
- در این مقاله، مسئله با تطبیق سازی یک کنترل مد لغزشی فازی تطبیقی، AFSMC، با یک سطح لغزشی PID برطرف شده است. برای این روش پیشنهاد شده، از یک کنترل منطق فازی جهت تولید سیگنال کنترل ضربهای استفاده می شود. علاوه برآن، گین خروجی کنترل مد لغزشی فازی، FSMC، توسط یک سیستم فازی نظارتی بصورت روی خط تنظیم میشود تا از chattering جلوگیری کند. کنترلر به کار گرفته شده در این مقاله از سه قسمت تشکیل شده است.در بخش اول کنترل کننده مد لغزشی، در بخش دوم کنترل کننده فازی و در بخش سوم کنترل کننده فازی تطبیقی به سیستم اضافه می شود و معادلات دینامیکی سیستم را تحت کنترل خود در می اورد.این مقاله به طور کامل در دو بخش جداگانه شبیه سازی شده است و تمامی اشکال موجود در مقاله استخراج شده اند. قبل از اجرای برنامه های متلب، ضروری است که فایل توضیحات به طور کامل مطالعه شود.
- فایل های همراه: فایل PDF مقاله، فایل Word توضیحات راهنمای استفاده از کدهای متلب، فایل Word شامل ترجمه کامل و توضیحات مقاله در 28 صفحه ، فایل های Simulink متلب
- کلمات کلیدی: کنترل کننده مد لغزشی، کنترل کننده فازی، کنترل کننده تطبیقی ، بازوی ربات ، رباتیک ،مقالات شبیه سازی شده، مهندسی برق
راهنمای خرید:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.








وحید
سلام من این پروژه رو خریدم اما صفحه دانلود آن بالا نمیاد و قابل دانلود نیست مشکلش چیه؟
مهندس بابایی
سلام
لطفا موضوع رو با پشتیبانی سایت مطرح نمایید تا سریعتر برطرف گردد.