 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

شبیه سازی مقاله کنفرانس IEEE Conference on Decision and Control, سال 2002
Global stabilization of a PVTOL aircraft with bounded thrust
-
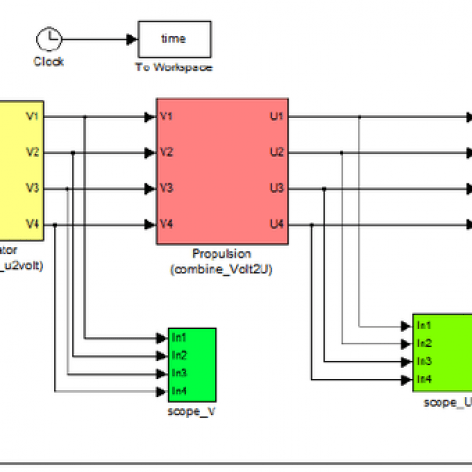
در این مقاله به کنترل یک PVTOL ، ربات های عمود پرواز مسطح، می پردازد. در این مقاله با استفاده از یک روش کنترلی بر مبنای ترکیب روش غیرخطی توابع اشباع ، میزان نیروی تراست را با توجه به کران دلخواه تابع اشباع محدود می کند. با استفاده از الگوریتم در نظر گرفته شده همگرایی جهانی حالت های سیستم به سمت مقادیر مبدا به راحتی انجام می پذیرد. این مقاله گزارش فارسی ندارد اما تمامی شکل های اصلی این مقاله در سه فایل سیمولینک جدا استخراج می گردد. . قبل از اجرای سیمولینک های متلب، ضروری است که فایل توضیحات به طور کامل مطالعه شود.
-
فایل های همراه: فایل PDF مقاله، فایل Word توضیحات راهنمای استفاده از سیمولینک های متلب، فایل های Simulink های متلب
-
کلمات کلیدی: رباتیک، مقالات شبیه سازی شده، مهندسی برق
۱۷۸,۸۰۰ تومانAdd to cart
راهنمای خرید:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.





نقد و بررسیها
هنوز بررسیای ثبت نشده است.