 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم


فیلمهای مربوط به کنترل مقاوم فیدبک حالت سیستمهای خطی تحت اغتشاش و همچنین کنترل فیدبک خروجی سیستمهای خطی با استفاده از رویتگر قبلا خدمت دوستان تقدیم شده است. اگر سیستمی هم تحت تاثیر اغتشاش خارجی بوده و هم امکان اندازهگیری تمامی حالتها وجود نداشته باشد، دیگر نمیتوان از این فیلمها برای چنین سیستمی استفاده کرد. در سری فیلمهای حاضر دقیقا این مشکل مدنظر قرار گرفته و هدف طراحی یک کنترلکننده مقاوم برای سیستمهای خطی تحت تاثیر اغتشاش فقط با استفاده از یک یا چند خروجی سیستم است. کنترل کننده مورد نظر دارای رویتگر نبوده ولی دارای دینامیک داخلی است. همچنین تنها از خروجی سیستم فیدبک گرفته شده و نیازی به ورودی سیستم تحت کنترل ندارد. معیار تضعیف اغتشاش همان نرم ∞H است که به تفصیل در سری فیلمهای کنترل مقاوم سیستمهای خطی تحت اغتشاش با استفاده از نامساویهای خطی ماتریسی تشریح شده و ارتباط آن با تلف کنندگی (Dissipativity) و پایداری بهره L2 بحث شده است. برای اطلاعات بیشتر در مورد تضعیف اغتشاش از طریق نرم ∞H و مزایای فرمولبندی این مساله به شکل LMI به فیلمهای مربوط به کنترل مقاوم سیستمهای خطی تحت اغتشاش با استفاده از نامساویهای خطی ماتریسی مراجعه کنید.
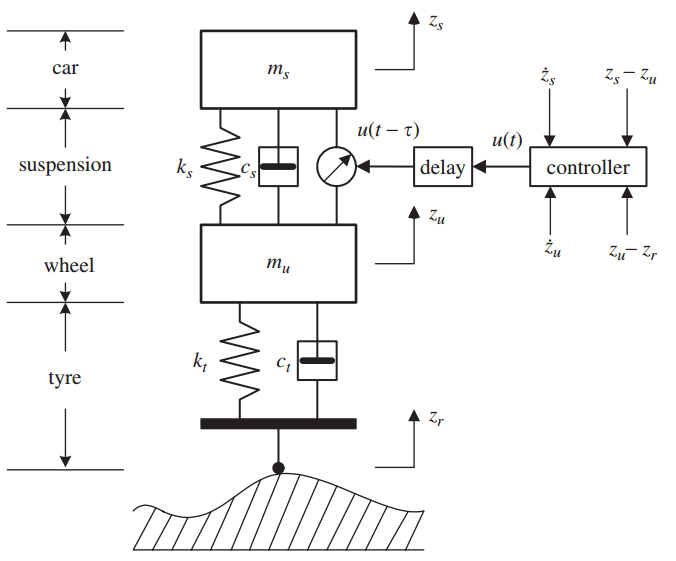
بعد از محاسبه نامساویهای ماتریسی خطی لازم برای حل مساله که ایده اصلی آن از یک مقاله IEEE گرفته شده است، روش پیشنهادی بر روی یک مدل یک چهارم سیستم تعلیق خودرو پیاده شده و سیستم حلقه بسته هم در محیط m-file و هم در سیمولینک شبیهسازی شده است. همچنین توابع تبدیل از نویز اندازه گیری، اغتشاش خارجی و ورودی مرجع به خروجی محاسبه شده و پهنای باند سیستم حلقه بسته و خواص تضعیف نویز و اغتشاش به صورت تحلیلی و شبیهسازی مورد بررسی قرار گرفته است. لازم به ذکر است که سیستم تعلیق در این سری فیلمها فقط به عنوان یک مثال کاربردی مورد استفاده قرار گرفته است و توضیح اضافی در مورد آن ارائه نشده است. برای درک بهتر این مثال شاید بهتر باشد قبل از دیدن این سری فیلمها، جلسات مربوط به مدلسازی و شبیهسازی ارتعاشات جاده برای سیستم کنترل تعلیق فعال خودرو را ملاحظه کنید و بعد از اینکه با سیستم تعلیق آشنا شدید، این سری فیلمها را ببینید.
با امید به اینکه مورد رضایت شما عزیزان قرار بگیرد
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری پایداری لیاپونوف – آشنایی با کدنویسی در محیط متلب – آشنایی با نامساویهای ماتریسی خطی (LMI)
قبل از دیدن ادامه پست، راهنمای استفاده از سری فیلمهای کنترل مقاوم را حتما ببینید:
جلسه اول:
فرمولبندی طراحی کنترل مقاوم فیدبک خروجی برای سیستمهای دارای اغتشاش خارجی
استخراج LMI های مورد نیاز با استفاده از مکمل شور و تبدیل متجانس
پیادهسازی کنترلکننده مقاوم بر روی سیستم تعلیق فعال خودرو و شبیهسازی در متلب
شبیهسازی در محیط سیمولینک و تحلیل در حوزه فرکانس
جلسه دوم:
جلسه سوم:
جلسه چهارم:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.








مصطفي
سلام آقاي دكتر وقت شما بخير
مدل بنده غير خطي هست اگر خطي سازي ژاكوبين نخوام انجام بدم و صرفا به كمك feedback linearization خطي سازي را انجام بدم آيا ميتونم به كمك LMI كنترل مقاوم طراحي كرد؟ آيا مثالي هست من بهش رجوع كنم؟ با تشكر
مسعود
سلام، یک خلاصه از معادله دینامیکی سیستم بگذارید
دکتر علی جوادی
سلام.
منظورتون رو متوجه نشدم. کدام معادله دینامیکی سیستم؟
هادی
سلام آقای دکتر. وقتتون بخیر.
اگر بعد از گذشت مثلا 1 ثانیه اغتشاش پله ای به سیستم وارد شود، در همان لحظه اول وارد شدن اغتشاش، سیگنال های حالت از سمت چپ مشتق پذیر نیستند.
از طرفی در سمت چپ معادلات حالت، ما مشتق سیگنال حالت را داریم، ولی در لحظه ورود اغتشاش سیگنال ها مشتق پذیر نیستند. این مساله را چگونه ارزیابی می نمایید؟
با تشکر
دکتر علی جوادی
سلام
سوال رو نفهمیدم
هادی
عذرخواهم که خوب توضیح ندادم.
به طور واضح تر بخواهم بگویم:
سیستمی دارم که به آن اغتشاش پله ای بین بازه 1 و 4 ثانیه وارد شده است. وقتی حالت های سیستم را مشاهده می کنیم، در لحظه 1 و 4 مشتق پذیر نیستند. از طرفی در معادلات حالت، با مشتق سیگنال های حالت سر و کار داریم.
سوال این است که اگر نقاط مشتق ناپذیر در حالت های سیستم وجود داشته باشد، بنابراین معادلات حالت برای آن صادق نیست.
شما چگونه این مساله را ارزیابی می کنید؟
با سپاس
دکتر علی جوادی
اولا مشتق پذیری رو تابع تعریف میشه نه روی حالت یا متغیر.
از طرفی دیگه تغییرات ناگهانی اغتشاش روی مشتق حالتها اثر میذاره نه روی خود حالتها
هادی
ممنونم بابت وقتی که گذاشتید.
سپاسگزارم از شما استاد گرانقدر
مصطفي
آقاي دكتر سلام و عرض ادب.
غرض از مزاحمت اينكه در مدلي كه بنده دارم دو تا ورودي وجود داره يكي ورودي خارجي و يكي ورودي كنترلر. ورودي خارجي هميشه يك عدد ثابت هست منتهي ميتونه تحت اغتشاش قرار بگيره بنده اين دو تا ورودي را به عنوان u (ورودي كنترلر و عدد ثابت ورودي خارجي) در نظر گرفتم و مقدار اغتشاشي كه ورودي خارجي ميتونه تحمل كنه را اغتشاش و w.طبق فرمايشات جنابعالي وقتي مدل كردم تو قسمت حل LMI، بعد از ران كردن خطا ميده :
All matrices on a row in the bracketed expression must have the same number of rows.
Error in kitedisturbance (line 145)
Cons=[ [R eye(nx);eye(nx) S] >=0]+..
علت اين خطا را كه بررسي كردم به نظر ميرسه كه قرار دادن ورودي خارجي و كنترلر در يك بردار مشكل ساز ميشه. عرض بنده اينه براي حل اين مشكل چه كاري بايدكرد؟ با تشكر از محبتتون
عرضم اينه آيا
دکتر علی جوادی
سلام
من دقیقا نمیدونم منظورتون از ورودی خارجی چیه ولی تا جایی که فهمیدم ورودی خارجی تحت کنترل ما نیست بنابراین ورودی کنترلی حساب نمیشه.
در نتیجه ورودی خارجی میتونه به صورت اغتشاش در نظر گرفته بشه.
البته اغتشاشی که در روش H-infinity وجود داره نباید انرژی نامحدود داشته باشه (مثل همین حالتی که اغتشاش مقدار ثابت باشه) بنابراین اگر این ورودی خارجی رو اغتشاش هم در نظر بگیرید باز نمیشه از روش H-infinity استفاده کرد.
اصولا باید از روشهای دیگر اثر این نوع اغتشاش حذف بشه که البته من روش سیستماتیک برای این حالتها رو نمیشناسم و باید ببینید در مراجع چیکار میکنند
هادی
سلام آقای دکتر. ممنونم بابت آموزش های خوبتان.
زمانی که شرایط اولیه صفر باشد، ثابت می کنیم که نسبت انرژی z به w از گاما کمتر است. در صورتی که شرایط اولیه و اغتشاش هم زمان غیر صفر باشد، آیا باز هم این نسبت از گاما کمتر است؟
چگونه این مساله را توجیه می نمایید؟
با تشکر فراوان
دکتر علی جوادی
سلام
برقرای LMI بدست آمده برای حالت بدون شرایط اولیه و در حضور اغتشاش، تضمین میکند که مشتق تابع لیاپونوف برای سیستم بدون اغتشاش و دارای شرایط اولیه منفی باشد
هادی
با تشکر از شما بابت پاسخگویی.
یعنی در صورتی که شرایط اولیه و اغتشاش هم زمان غیر صفر باشد، ما باز هم باید منتظر پایداری مجانبی سیستم باشیم یا هیچ تضمینی در این صورت نیست؟
با سپاس فراوان از شما استاد گرامی
دکتر علی جوادی
بله تضمین وجود داره وگرنه این روش به هیچ دردی نمیخوره
محمدرضا
سلام آقای دکتر وقت بخیر
توی سیستمی که من طراحی کردم توی دیاگرام بود و یک فرکانس مشخصی سیستم پسیو بهتر از سیستم اکتیو عمل میکنه (مثل مثالی که شما تدریس کردین) ولی وقتی توی حوزه زمان من یک اغتشاشی سینوسی رو با همون فرکانس میدم بازهم سیستم اکتیو عملکردش بهتره من انتظارم اینه بر طبق دیاگرام بود سیستم کنترلی دامنه اون اغتشاش رو افزایش بده (نسبت به حالت پسیو) ولی این طور نمیشه آیا ایرادی در نتاج من هست و یا اینکه نتایج پاسخ فرکانسی رو نمیشه به حوزه زمان ربط داد؟!
با تشکر
دکتر علی جوادی
سلام
اگر در حوزه فرکانس پسیو بهتر باشه، در همون فرکانس و در حوزه زمان هم باید این اتفاق بیافته.
شاید به خاطر اشتباهات کدنویسی یا همچین اشتباهاتی باشه
امین
سلام آقای دکتر. وقت جنابعالی بخیر.
یک سوال کلی از خدمتتان داشتم.
مفهوم سیستم های کنترل خطی چیست؟
آیا پلنت باید خطی باشد یا کنترل کننده خطی باشد؟ آیا اگر با استفاده از خطی سازی پلنت، کنترل کننده خطی طراحی کنیم، سپس سیگنال ورودی را به پلنت غیرخطی اعمال کنیم، سیستم کنترل خطی محسوب می شود؟
با سپاس از شما استاد محترم
alij63@gmail.com
سلام
معولا به حالتی که پلنت خطی باشه، سیستمهای کنترل خطی گفته میشه