 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

طی چند سال اخیر بحث سیستمهای هایبرید (Hybrid Systems) بسیار داغ شده است. این سیستم ها با قابلیت تلفیق حالت های پیوسته و گسسته تبدیل به ساختارهایی قدرتمند و جذاب برای مدل سازی، تحلیل و یا کنترل سیستم های پیچیده شده اند. کاربری های سیستم ها در مسائل عملی همچون سیستم های قدرت، سیستم های زیستی، سیستم های کامپیوتری و کنترل شبکه ای باعث شده تا محققین علاقه زیادی برای تحقیق در رابطه با آن ها داشته باشند. این روز ها این بحث آنقدر گسترده شده که حتی در دانشگاه های ایران هم درس سه واحدی کنترل سیستم های هایبرید ارائه می شود. سیستم های سوئیچینگ یا کلیدزن (Switching Systems) به عنوان کلاس خاصی از این سیستم های هایبرید مطرح می شوند که کاربردهای بسیاری دارند. از آنجایی که مرجع منسجم و کاملی (اعم از کتاب یا مقاله) که مفاهیم مورد نیاز این سیستم ها را به صورت یکجا ارائه کند وجود ندارد برآن شدم تا آموزشی جامع را در باره سیستم های کلیدزن ارائه بدهم. این آموزش به تدریج جلو خواهد رفت و به معرفی سیستم های سوئیچینگ، معادلات ریاضیاتی، کاربردها، مثال های عملی، چالش ها، و تئوری های ریاضی و اثبات آن ها خواهند پرداخت.
پیش نیاز ها: کنترل خطی، کنترل مدرن
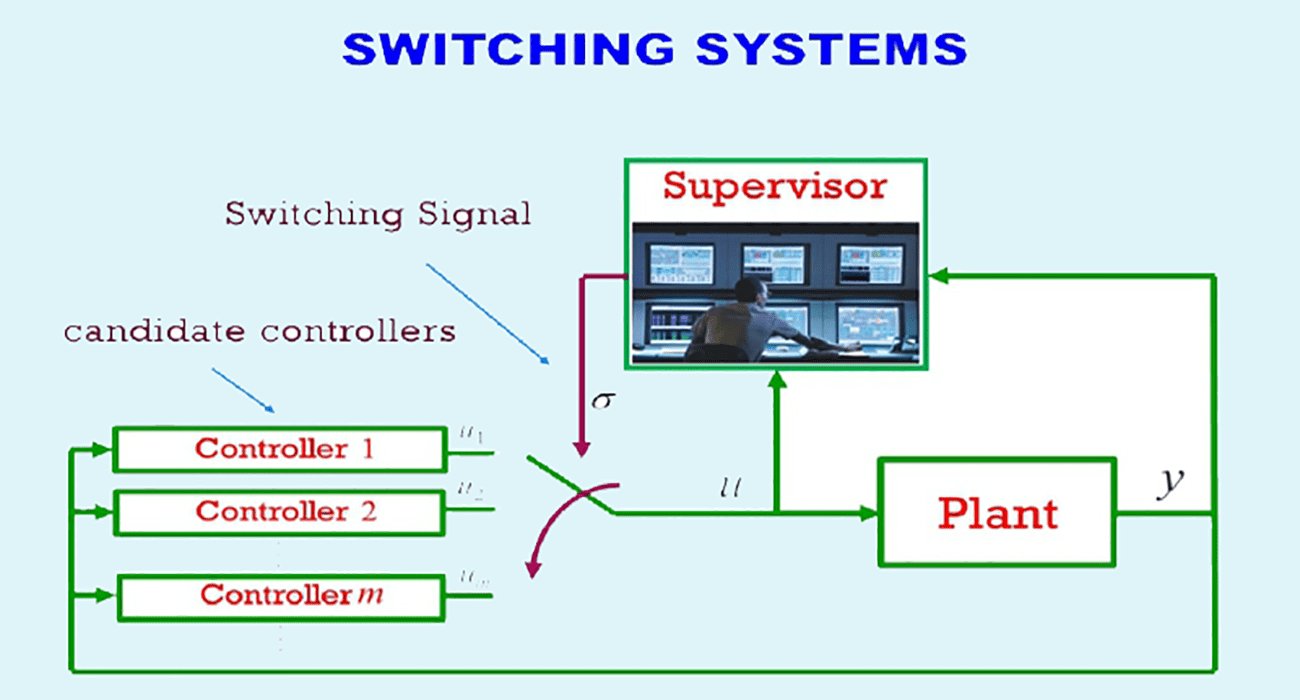
جلسه اول: در این جلسه مقدمه ای از سیستم های کلیدزن بیان شده است. ابتدا سیستم سوئیچینگ یا سیستم کلیدزن تعریف شده و جایگاه آن در رده سیستم های هایبرید مشخص شده است. سپس معادلات ریاضیاتی آن به صورت مختصر ارائه شده و مفهوم سیگنال کلیدزنی (Switching Signal) شرح داده شده است. در ادامه ضرورت، اهمیت و کاربرد سیستم های کلیدزن مورد بحث قرار گرفته و درنهایت نمونه های از سیستم های عملی و مثال های کاربردی ارائه شده اند.
مدت زمان: 43 دقیقه
محتوا: فایل تصویری 720p و پاورپوینت درس
پیش نمایش جلسه اول:
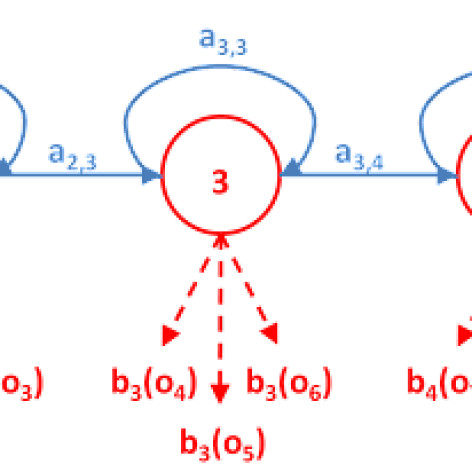
جلسه دوم: در جلسه اول از این مجموعه آموزشی به معرفی مقدماتی سیستم های کلیدزن پرداخته شد. در جلسه دوم، معادلات ریاضیاتی این نوع سیستم ها ارائه شده و نحوه مدل سازی آن ها مورد بحث قرار گرفته است. تعاریف اساسی این سیستم ها که در اغلب مقالات با آن ها مواجه می شویم ارائه شده و در نهایت انواع این سیستم ها معرفی شده اند. دسته بندی سیستم های سوئیچینگ در این جلسه با چند رویکرد مختلف صورت گرفته و سعی شده تا کلاس های مربوط به سیستم های کلیدزن وابسته به حالت (State dependent Switching Systems)، ، سیستمهای کلیدزن وابسته به زمان (Time dependent Switching Systems) سیستم های کلیدزن تصادفی (Stochastic or Random Switching Systems)، سیستم های کلیدزن زمان اقامت (Dwell-time Switching Systems)، و سیستم های کلیدزن دلخواه (Arbitrary Switching Systems) به صورت مفصل مورد بررسی قرار گیرند. در نهایت مثال های عملی و کاربردی برای هر یک از انواع سیستم های کلیدزن بیان شده است.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری 720p و پاورپورینت درس
پیش نمایش جلسه دوم:
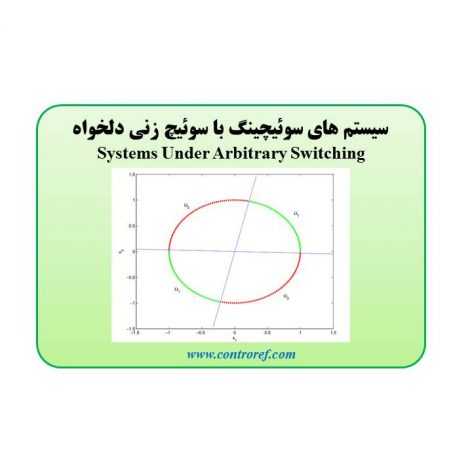
جلسه سوم: در جلسات اول و دوم این آموزش مقدمه ای از سیستم های سوئیچینگ بیان شده و روابطه و مدل های ریاضیاتی آن ها معرفی شدند. سپس کلاس ها و انواع مختلف این سیستم ها ارائه شدند. در این جلسه به چالش های پیش روی این سیستم ها اشاره شده و بحث پایداری و پایداری پذیری سیستم های کلیدزن مطرح گشته است. ابتدا تعاریف پایداری و پایداری پذیری بیان شده و سپس پایداری سیستم های کلیدزن وابسته به حالت(State dependent Switching Systems)، سیستم های کلیدزن تصادفی (Stochastic Switching Systems)، سیستم های کلیدزن زمان اقامت (Dwell-time Switching Systems)، و سیستم های کلیدزن دلخواه (Arbitrary Switching Systems) به صورت مفصل مورد بررسی قرار گرفته اند.
مدت زمان: 45 دقیقه
محتوا: فایل تصویری 720p و پاورپورینت درس
پیش نمایش جلسه سوم:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.




داریوش
سلام وقت بخیر. ممنون از اموزشها و وقتی که گذاشتید. در سوئیچینگ زمان توقف مفهوم این جمله چیست؟؟ممنون میشوم رهنماییم کنید
The required lower bound
on Td can be explicitly calculated from the exponential decay bounds on
the transition matrices of the individual subsystems.
حمید
با سلام.لطفا درباره ی بررسی پایداری سیستم های سوییچینگ و کاربرد در سیستم های کلید زنی قدرت یک مقاله یا مرجع معرفی بفرمایید
دکتر فرجی
سلام
مرجع خاصی سراغ ندارم اما نمونه مقاله زیاد هست که می تونید تو گوگل اسکالر پیدا کنید مثلا این
https://teams.microsoft.com/_#/school/files/General?threadId=19%3A6df622543c6643f7b35fc8e1a144ec09%40thread.skype&ctx=channel&context=Screening%252C%2520Concatenated%2520MATLAB%2520database&rootfolder=%252Fsites%252FWMGNEXTRODEProjectinternal%252FShared%2520Documents%252FGeneral%252F5.2%2520Data%2520Analysis%252FElectrode%2520Coating%252FMegtec%2520coater%252FScreening%252C%2520Concatenated%2520MATLAB%2520database
نور
سلام خانم وقتتون بخير
من چنده تمرین ها دارم خیلی سخته بموضوعات
stablity under slaw switching,stablization by state _dependent switching
می تونین کمک کنم
مدیر سایتادمین سایت
سلام متاسفانه ایشون اصلا وقت ندارند. در لندن پست داک میخونن
الیاس
ممنونم بابت پاسخگویی شما.
در واقع اصطلاح سیستم های کنترل بازنشانی رایج است (Reset control systems). به عبارت دیگر اگر شرایط ریست که معمولا خطا برابر صفر (e=0) برآورده شود. حالت های کنترل کننده به مقادیر دیگر پرش می کنند، تا پاسخ حالت گذرا بهبود یابد.
دکتر فرجی
درسته. اطلاعات دقیقی از این نوع سیستم ها ندارم متاسفانه.
ولی به طور کلی می تونم بگم که سیستم های سوییچینگ هم به همین صورت از یک حالت به حالت دیگه ای سوییچ می کنن و معمولا اون قاعده ای که باعث سوییچ می شه موقع طراحی کنترل کننده هم لحاظ می شه که باعث بهتر شدن پاسخ می شه.
الیاس
سلام خانوم دکتر. وقت شما بخیر.
ممنونم از آموزش خوبتان.
میخواستم بدانم فرق کنترل کننده های ریست شونده و کنترل کننده های هیبریدی چیست؟
سپاسگزارم از شما
دکتر فرجی
سلام.
من تا حالا اصطلاح کنترل کننده ی ریست شونده رو نشنیدم. ترجمه اش به انگلیسی چی هست؟
الیاس
ممنونم بابت پاسخگویی شما.
در واقع اصطلاح سیستم های کنترل بازنشانی رایج است (Reset control systems). به عبارت دیگر اگر شرایط ریست که معمولا خطا برابر صفر (e=0) برآورده شود. حالت های کنترل کننده به مقادیر دیگر پرش می کنند، تا پاسخ حالت گذرا بهبود یابد.
فرزاد
سلام من چند روز پیش هم کامنت گذاشتم متاسفانه اقدامی انجام نشد، بنده این مجموعرو خریداری کردم و لینک به ایمیلم فرستاده شده ولی متاسفانه نمیشه از طریق لینکا دانلود کرد فایلارو لطفا یه جوابی بدین ممنون
دکتر فرجی
سلام لطفا در قسمت تماس با مدیریت سایت مشکل رو مطرح بفرمایید یا از طریق شماره تماس درج شده تماس بگیرید. مدیریت سابت مشکل رو براتون حل می کنن مدرسین به جزییات فنی دسترسی ندارن
zahra
واقعیت من روی کنترل پیش بین میخوام کار کنم و اینکه مقالاتی که پیدا می کنم سیستم با اختلال و نامعینی هستش.
یک مقاله برای کنترل پیش بین سیستم نامی خطی سوئیچینگ با سوئیچینگ دلخواه لازم دارم برای اینکه بیس کار را یاد بگیرم ولی هر چی سرچ میزنم نمیتونم پیدا کنم.اگر کمکم کنید خیلی لطف بزرگی در حق بنده کردید.
امکان داره ایمیل شما را داشته باشم؟؟؟؟؟؟؟؟
دکتر فرجی
بهتره که یکی از همون مقالات رو بردارید و خودتون به حالت بدون اعتشاش و نامعینی ساده اش کنید
ایمیل من
faraji_mona@yahoo.com
zahra
چون با ریاضیاتش زیاد اشنا نیستم مطمین نیستم که درست این کارو انجام داده باشم یا خیر.
ممنون خیلی لطف کردید.
zahra
باعرض سلام وخسته نباشید
خانم دکتر شما روی کنترل کننده برای سیستم های سوئیچینگ هم کار کرده اید؟
مخصوصا کنترل پیش بین
دکتر فرجی
سلام
من بیشتر روی پایدارسازی و کنترل مقاوم سیستم های سوییچینگ کار کردم
فاطمه
سلام
میشه منابعی که برای این بخش استفاده کردید را بفرمایید
دکتر فرجی
سلام
منابع در انتهای آموزش ذکر شدن.