مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
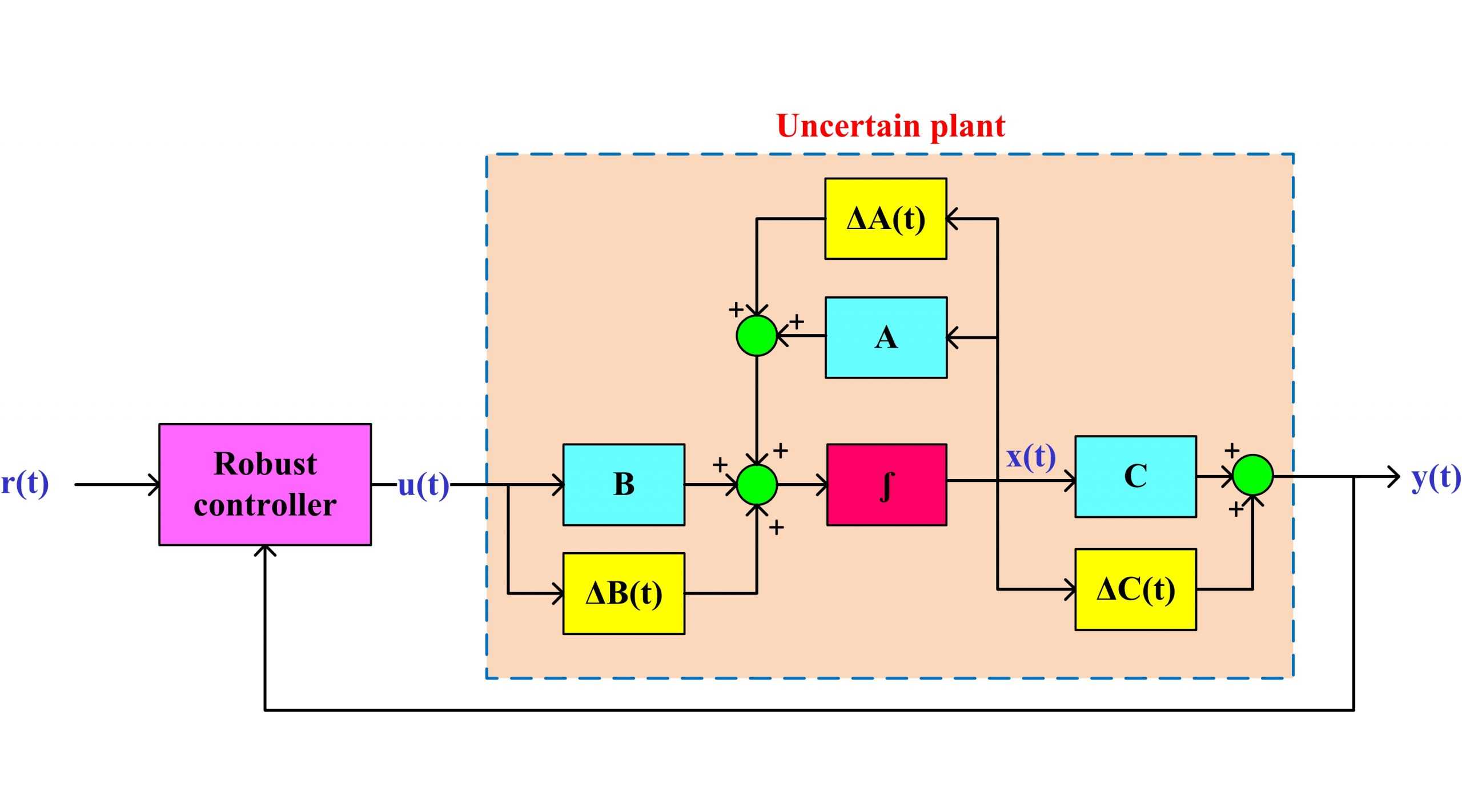
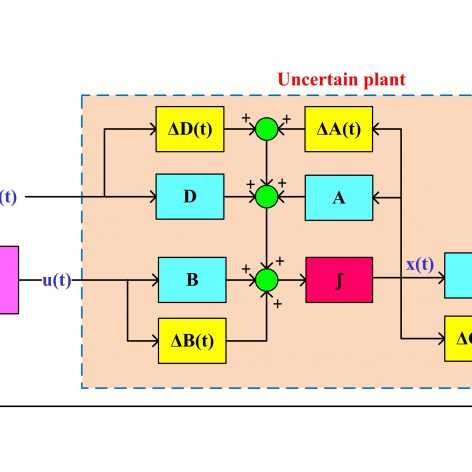
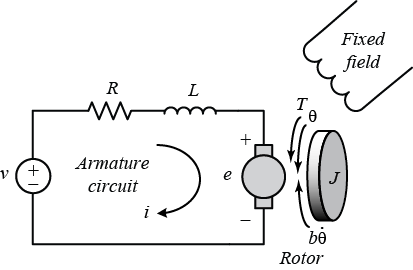
در سری فیلمهای قبلی موجود در سایت به صورت جداگانه کنترل مقاوم سیستمهای خطی تحت نامعینی پارامتری با فیدبک حالت و کنترل فیدبک خروجی سیستمهای خطی بدون نامعینی مورد بررسی قرار گرفتند. ممکن است شرایط سیستم به گونه ای باشد که هم نامعینی پارامترهای سیستم قابل ملاحظه بوده و هم اندازه گیری تمام حالتها از طریق سنسور امکان پذیر نباشد. در این موقعیتها امکان استفاده از روشهای فوق وجود ندارد و باید ساختار کنترل کننده اصلاح شود. در این سری جلسات، یک کنترل کننده مقاوم دینامیک برای سیستمهای خطی تحت نامعینی پارامتری به گونهای طراحی میشود که فقط از خروجی (یا خروجی های) سیستم برای کنترل استفاده میکند و نیازی به تمام حالتها ندارد. لازم به ذکر است که با استفاده از رویتگرهای مرسوم لیونبرگر این مساله قابلیت تبدیل به LMI را نداشته و بنابراین از یک کنترل کننده دینامیک دیگر استفاده شده است و مساله طراحی این کنترل کننده به چند نامساوی ماتریسی خطی تبدیل شده است. در انتها برای ارزیابی عملکرد، این کنترل کننده به همراه یک کنترل کننده فیدبک خروجی غیر مقاوم (با استفاده از رویتگر لیونبرگر) بر روی مدل خطی یک موتور DC پیاده شده و تحت پروفایلهای مختلف نامعینی از جمله نامعینی های ثابت، سینوسی و تصادفی عملکرد هر دو سیستم کنترل مورد بررسی قرار گرفته است. همچنین علاوه بر رگولاسیون، مسایل ردیابی و تحلیل پاسخ فرکانسی هر دو سیستم حلقه بسته بررسی شده و خواص تضعیف نویز و پهنای باند سیستم در شبیهسازی ها برای دو روش فوق باهم مقایسه شدهاند. لازم به ذکر است که بنابه درخواست مکرر شما عزیزان شبیهسازیها هم به صورت کد انجام شده و هم در محیط سیمولینک.
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری پایداری لیاپونوف – آشنایی با کدنویسی در محیط متلب – آشنایی با نامساویهای ماتریسی خطی (LMI)
قبل از دیدن ادامه پست، راهنمای استفاده از سری فیلمهای کنترل مقاوم را حتما ببینید:
جلسه اول:
فرمولبندی طراحی کنترل مقاوم فیدبک خروجی برای سیستمهای دارای نامعینی پارامتری
استخراج LMI های مورد نیاز با استفاده از مکمل شور و تبدیل متجانس
پیادهسازی کنترلکننده مقاوم بر روی دینامیک خطی موتور DC و شبیهسازی در متلب
شبیهسازی در محیط سیمولینک و تحلیل در حوزه فرکانس
قیمت اصلی ۲۵۲,۰۰۰ تومان بود.۱۶۸,۰۰۰ تومانقیمت فعلی ۱۶۸,۰۰۰ تومان است.Add to cart
جلسه دوم:
جلسه سوم:
جلسه چهارم:
 با استفاده از نامساویهای ماتریسی خطی (LMI)")
 با استفاده از نامساویهای ماتریسی خطی (LMI)")