کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از روشهای کنترلی بهینه رگولاتور درجه دوم خطی (Linear Quadratic Regulator) است که به اختصار LQR خوانده میشود. این روش برای سیستمهای خطی بهینه بوده و با توجه به روند سرراست طراحی و سادگی ساختار آن در کاربردهای فراوانی با موفقیت مورد استفاده قرار گرفته است. با اینکه روش LQR تنها برای سیستمهای خطی بهینه بوده و پایداری سیستم را تضمین میکند، با استفاده از خطیسازی ژاکوپی، میتوان آنرا به سیستمهای غیرخطی نیز اعمال کرد؛ هرچند در اینصورت کنترلکننده دیگر بهینه نیست اما در بسیاری از کاربردها عملکرد خوبی از خود نشان میدهد. در این مجموعه آموزشی نحوه طراحی و پیادهسازی کنترلکننده LQR برای سیستمهای خطی و غیرخطی در محیط نرمافزار متلب آموزش داده میشود.
پیشنیاز: آشنایی اولیه با نرم افزار متلب – تئوری سیستمهای خطی
جلسه اول:
معرفی سیستمهای کنترل بهینه LQR و دستورات متلب
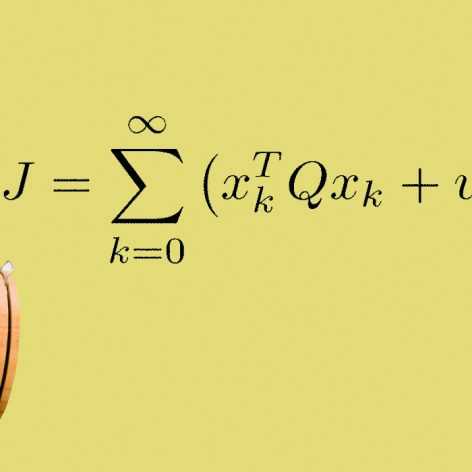
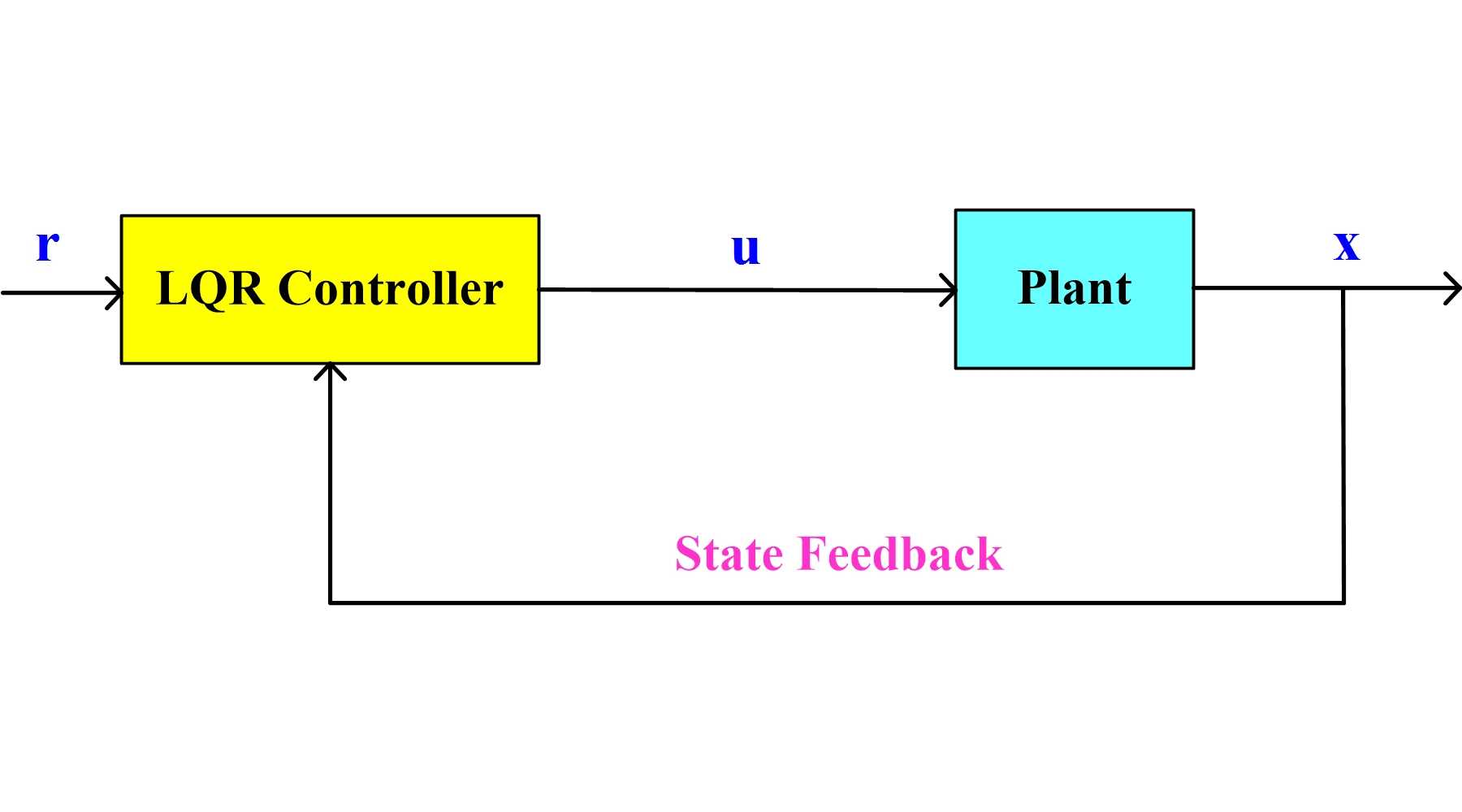
در این جلسه انواع سیستمهای کنترل بهینه (LQR (Linear Quadratic Regulator اعم از پیوسته، گسسته، هیبریدی، زمان محدود (Finite-Horizon) و زمان نامحدود (Infinite-Horizon) معرفی میشوند. ابتدا الگوریتم LQR برای سیستمهای پیوسته و گسسته معرفی شده و معادلات ریکاتی (Riccati Equation) متناظر ارائه میشوند. سپس تمام دستورات متلب مرتبط با LQR (پیوسته، گسسته و هیبریدی) معرفی شده و ورودیها و خروجیهای آنها تشریح میشوند. همچنین دو روش برای ایجاد ویژگی ردیابی سیگنال مرجع با استفاده از کنترلکننده بهینه LQR ارائه شده و دستور متلب آن معرفی میشود.
مدت زمان آموزش: 71 دقیقه
حجم فایل: 103 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کتاب Kwakernaak
پیش نمایش جلسه اول:
جلسه دوم:
طراحی و شبیهسازی کنترلکننده بهینه LQR برای سیستم گوی و میله
در این جلسه کنترلکننده بهینه LQR برای سیستم گوی و میله (Ball & Beam) طراحی شده و در محیط متلب پیادهسازی میشود. ابتدا مدل خطی سیستم گوی و میله از وبسایت CTMS معرفی شده و نقاط تعادل آن استخراج میشود. با توجه به مباحث جلسه پیش کنترلکنندههای پیوسته، انتگرالی و هیبریدی برای آن در محیط m-file طراحی شده و سیستمهای حلقه بسته به صورت جداگانه در فایلهای سیمولینک شبیهسازی میشوند. همچنین اثر تغییرات ماتریسهای وزنی و زمان نمونهبرداری در روش هیبریدی بر روی قطبهای حلقه بسته، حالت گذرای سیستم و ورودی کنترلی بررسی میشود. در تمام حالتها نحوه ایجاد ردیابی ورود مرجع تشریح شده و در فایلهای سیمولینک نشان داده میشوند.
مدت زمان آموزش: 90 دقیقه
حجم فایل: 150 مگابایت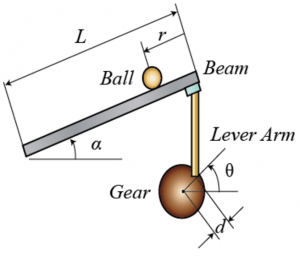
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و فایلهای متلب
پیش نمایش جلسه دوم:
جلسه سوم:
طراحی کنترلکننده بهینه LQR برای سیستمهای غیرخطی و پیادهسازی بر روی سیستم شناور مغناطیسی
در این جلسه نحوه طراحی کنترلکننده بهینه LQR برای سیستمهای غیرخطی تشریح میشود. ابتدا نحوه انتقال نقطه نامی (Nominal point) به مبدا برای یک سیستم غیرخطی در حالت کلی تشریح شده و نحوه خطیسازی آن حول نقطه نامی توضیح داده میشود. سپس برای سیستم خطی شده با استفاده از روشهای موجود یک کنترلکننده LQR طراحی میشود. برای نشان دادن روند طراحی، سیستم شناور مغناطیسی (Magnetic Levitation) که در تکنولوژی قطارهای مغناطیسی کاربرد دارد، معرفی شده و سپس حول نقطه نامی خطی میشود. سپس برای سه حالت پیوسته، هیبریدی و انتگرالی کنترلکنندههای بهینه LQR برای آن طراحی میشود. در نهایت همه حالتها در محیط سیمولینک پیادهسازی شده و نتایج تحلیل و مقایسه میشوند.
مدت زمان آموزش: 76 دقیقه
حجم فایل: 152 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و فایلهای متلب
پیش نمایش جلسه سوم:
برای خرید کل جلسات با 10 درصد تخفیف گزینه آخر را انتخاب کنید
۲۸۸,۰۰۰ تومان قیمت اصلی ۲۸۸,۰۰۰ تومان بود.۱۶۴,۴۰۰ تومانقیمت فعلی ۱۶۴,۴۰۰ تومان است.Add to cart
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



")
")